
So here’s the thing: “Robots are still being built in the same way as they have been for 70 years, since the dawn of robotics and its Taylorist and Fordist approach.” 😱 But guess what? This is about to change in fascinating ways, as Sascha Freyberg & Helmut Hauser describe in “The Morphological Paradigm in Robotics.” Published in the journal on Studies in History and Philosophy of Science and exploring the future of robotics, this enthralling study features a zombie trout, a very clever seed, and our favorite spidey sense.
(For my work on the decentralization of social good application of robotics worldwide, please see WeRobotics, an international tech nonprofit that I co-founded and led as executive director for 7+ years. Freyberg and Hauser’s insights relate to this work, as explained in the conclusion below).
It’s been decades, but the control approach in conventional robotics has hardly evolved: the center must constantly send signals to the periphery at each time step. More formally, morphology has no control function in robotics. The morphology of a robot refers to its structure, softness, shape, and surface properties. These properties do not act intelligently or independently from the brain (control center).
In contrast, “biological systems use morphological properties to implement intelligent behavior.” And they do so with excellent energy efficiency, robustness, and flexibility. Moreover, they’re quick to learn, even under highly noisy conditions. ”Interestingly, these highly complex tasks are often performed with extremely primitive brains–often without them at all.”
Enter the Zombie Trout
Let’s illustrate this by turning to Exhibit A from Mother Nature. Freyberg and Hauser use the curious case of “Shrödinger’s Trout” (stay with me here). The video below, captured by the Lauder Lab at Harvard, shows a trout swimming in their water tank. Water flows into the tank on the left side and straight out again on the right. “This allows a controlled laboratory environment to conduct reproducible experiments. The trout swims in a wonderfully natural movement from left to right and explores the surroundings. Or so it seems.”

Turns out, the trout is actually attached with a nylon string because, well, it’s dead. Condolences. The point being, “no nerve signals are sent, not a single muscle is activated. Nevertheless, the trout swims in the stream in an impressively natural way, even against the flow. This swimming movement arises purely from the morphological properties of the fish’s body (its structure, softness, shape and surface properties) and their reaction to the forces of the environment (the flow). So it is the materiality of the fish that (re)acts here. Based on these observations we could say that a significant part of the normal swimming behavior can also be performed by a dead fish.”
Talk about highly energy-efficient morphology! The trout’s swimming movement is achieved without muscle power, i.e., “without energy input [or control] on the part of the fish.” This example shows that biological systems use morphological properties to implement intelligent behavior, behavior that is mistakenly attributed to the brain. But in fact, this behavior often occurs locally, at the level of the body rather than from the control center.
This need not be surprising, however. As Freyberg and Hauser remind us, “long before neurons or even brains appeared, there were already species that displayed intelligent behavior in the biological sense. Even viruses, which are usually not included in the category of living organisms, use their morphology to gain access to the host cell.” And so, conceptually, “we can say that in the trout example, the morphology has the role of a controller for the movement.”
A Very Clever Seed Indeed
It stands to reason that a “deeper understanding of morphological principles could therefore be very helpful in building more adequate bodies for robots.” Freyberg and Hauser thus turn to Exhibit B from Mother Nature: seeds of the genus Erodium.

This curious seed has an unusual morphology that looks like a spiral. “When they fall to the ground, nothing happens until conditions are ideal. Only when it starts to rain do they react. The change in humidity affects the morphology and causes the spiral to unravel. At the same time, the unraveling bores the seed into the soil. In this case, the morphological properties of the seed have the ability to sense changes in moisture in their environment and then actively react by releasing the stored energy in the dried seed spiral.” Imagine how practical this high level of robustness would be in robotics!
The fact is, “even though the brain plays an important role in complex organisms, for some cases it can be too slow and, as a result, its intervention can be even counterproductive. For example, during the highly dynamic movement of walking or running, it is not the brain that is decisive as an instance of regulation, but the body schema. Instead of the brain controlling each muscle during walking (as in a conventional robot, for example), a combination of local and spinal neurons (outside of the brain) and morphological properties do most of the controlling.”
Spidey Sensing
Morphological properties also enable animals (humans included, of course) to translate nonlinear signals into more readily digestible information. They serve as a first filter, transforming complex environmental signals into linear data. “Morphology in this case is the first stage in the processing of information.”

Take the spider’s web, for example. In addition to the basic task of catching flies, “it’s also used as a means of communication. It is speculated that the spider uses its web as a signal processor that takes over complex non-linear filter functions.” To be sure, “spider webs can be described as non-linear dynamic systems that take on the role of a non-linear filter. There, too, is an input signal (air vibration and the movement of a trapped insect) and an output signal (mechanical vibrations).”
As Freyberg and Hauser note, “One could say that part of the computational processes has been outsourced to the morphology. That is exactly the idea of morphological computation. In order to obtain better morphologies for robots that are multifunctional and sustainable (i.e. economical and robust), it is therefore necessary to understand more precisely how morphological parameters are used in nature. That is, mere imitation is not enough. The underlying principles of operation must be realized.”
Meanwhile, Back in Robotics
The approach used in “conventional, industrial robotics not only ignores the morphological aspects, but deliberately suppresses them. Non-linear, complex dynamics, underactuation and compliance are all attributes that make computational modeling more difficult and, therefore, control more complex. […] But it is precisely these properties that enable biological systems to implement complex non-linear functionalities through their morphology and thus to simplify the control.”
To be sure, morphological computation can “significantly reduce the complexity of the overall task for a robot and the brain/central computer now has to do less and can be less involved and focus on other more cognitive tasks. Often the effect of this deregulation is that the digital controller only needs to intervene at specific times. For example, when the task changes, when environmental conditions change, or when the disturbance forces become too great and additional energy is needed.”
New Design Principles of Robotics
Several design principles can be derived from the above examples.
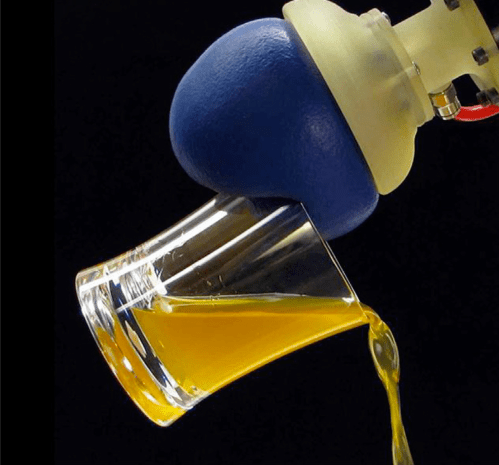
The Soft Principle. “The morphologies involved are mostly soft, flexible or compliant. This facilitates both the interaction between agent and environment and the exchange of energy between the two. As seen in the example of the spider web, soft structures can map more complex relationships between input and output. Softness also allows for the integration and storage of information over a limited period of time.” Check out EPFL colleague Jamie Paik’s work on soft robotics and her lab’s new piece in Nature on morphological flexibility in robotics systems.
The Freedom Principle. “Not every single degree of freedom of the system (in our case the body of the biological system) is directly regulated by control signals. However, it is important to note that we are not talking about computation in the manner of a Turing machine, which is digital, but rather about analogue, continuous computation that depends also on environmental conditions. The idea that computational functionality is implemented directly in the morphology is often expressed by using the term morphological computation.”
The Outsource Principle. “The dynamic properties of morphology are often nonlinear and complex. In general, their complexity is proportional to the complexity that can potentially be outsourced to the morphological structure. In contrast, a simple, rigid arm of a conventional robot has relatively simple dynamics and is therefore capable of only static transformation at most. However, if the morphology has dynamic and non-linear properties, then in principle it is possible to implement non-linear and dynamic computations, which are far more interesting transformations. Dynamics in this context also means integration of information over time, thus implying a memory function.”
Where We Go From Here
What if a systematic approach existed to convert computational functionality directly into the corresponding morphology? Such an approach doesn’t exist so far, but the authors believe that some of the answers may come from soft robotics materials since they often exhibit nonlinear dynamics.
In any case, the search for answers is likely to take us beyond classical areas of robotics research, thus decentralizing the exploration further. Other areas of research “can now contribute new technologies and in turn can draw inspiration from robotics. This ranges from material science and chemistry to completely new fields such as synthetic biology or minimal biology. In addition, the strong growth of additive manufacturing technologies is also playing a crucial role for this new generation of robots.”
In sum, “there is indeed a profound change in orientation happening in the field of robotics, characterized by a widening of scope and a pluralization and hybridization of approaches and principles.” As the authors note, when it comes to conventional robotics, optimization is only possible in software, “whereas Morphological Computation additionally enables adaptation in the morphology.” If we can change “both aspects (software and hardware) in a robot, then a much greater variety of behavior can be achieved,” much like we find in nature.
To conclude, if morphological computation and soft robotics are integrated into more conventional robotics, and merged with artificial intelligence, then a “completely new generation of intelligent machines might arise. The question will be what these machines and devices will be used for, since this will also shape research agendas. For even if technical inspirations are increasingly derived from natural figures and phenomena, their products always embody social functions as well as specific goals and broader consequences.”
We are thus left with several pressing questions:
“How will the impact of new robots look like? Will they assist or rather constrain? Will we soon live in habitats oriented more to the needs of machinic intelligence (so-called ‘smart cities’)?
A Word of Warning from Habermas
This is where I return to my work at WeRobotics, which seeks to make the application of robotics more inclusive and equitable, as exemplified by Flying Labs. The tagline of WeRobotics is “The Power of Local.” It is essential that the pluralization of approaches and principles described above include robotics experts from and across the Majority World. So in the questions above, who exactly is the “We” here? Are we talking about the inclusive “we”? We the People? Or the “Royal We”? The exclusive “we” of the so-called “Global North”?

In Toward a Rational Society (1970), the German philosopher Jürgen Habermas describes “the colonization of the public sphere through the use of instrumental technical rationality. In this sphere, complex social problems are reduced to technical questions, effectively removing the plurality of contending perspectives.” This explains why today’s social problems are “addressed only in aspects that are susceptible to technical solutions.”
But there’s no such thing as a purely technical problem when we bring robotics into society, which means that the solutions themselves cannot be technical alone. Solutions must be social, inclusive, plural, and diverse. As Freyberg and Hauser rightly conclude, “If we want to pose such questions seriously, the interrelations of epistemic and ethical, socio-political and technical, economic and ecological factors have to be taken into consideration, and need a more encompassing theoretical and political-epistemological understanding.”

Terrific article! Brilliantly written and simple, a complement,as it takes a higher understanding in order to simplify, I e. Japanese culture, who coincidentally loves robots! Continuing with the Asian mindset, less is more!
Thanks very much for reading and for your kind words, Giacomo!