
I was in Fiji earlier this month to work on a number of WeRobotics projects with our Pacific Flying Labs. One of these entailed the use of underwater drones to study the health of coral reefs near Maui Bay. We had the opportunity to test two new underwater drones for this project: the Trident by our technology partner, OpenROV and the PowerRay by the company PowerVision. Both drones only became available a just few months ago. In fact, we were the first not-for-profit organization to gain access to the Trident thanks to OpenROV’s invaluable support. These two underwater drones are now part of the Pacific Flying Labs fleet along with 2 aerial drones that we transferred to the team in Fiji. We’re planning to provide our other labs such as Tanzania Flying Labs with underwater drones as well in coming months. So what follows are some initial observations and lessons learned in the use of these underwater drones for data collection.

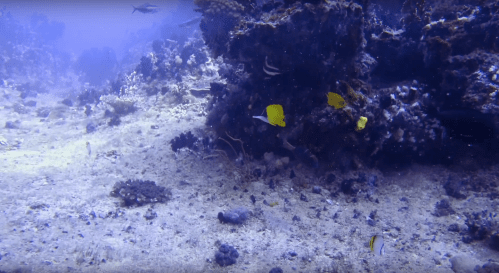
The first point to note is that underwater drones are tethered unlike most aerial drones (the yellow cable in the above photo). As such, their range is limited by the length of the tether. On the plus side, the drones we tested in Fiji have 2-3 hours of battery life. Another difference between underwater and aerial drones is that the former can only piloted manually while the latter can be programmed to operate autonomously. The reason is simple: GPS is not available underwater. The underwater drones we tested in the Pacific do have various features that seek to make the manual piloting easier. The PowerRay, for example, offers altitude (or rather depth) control to keep the drone more or less at the same depth while the Trident offers a stabilization feature.
Another difference between underwater and aerial drones is that the later are almost always piloted Beyond Visual Line of Site (BVLOS) contrary to most aerial drones. In other words, one loses sight of underwater drones within just a few meters of depth whereas aerial drones can be seen from several hundred meters away. This makes knowing where the drone is relative to your position rather challenging. An underwater drone pilot will have live video footage of what the drone sees right in front of them, but that can be quite limiting when operating BVLOS. On the plus side, the Trident software does include a helpful compass feature, displaying the direction that the drone is pointing in, which is a plus. But still, manually operating a drone BVLOS whether it flies or swim is particularly tricky.

In addition, piloting the underwater drones to swim in straight lines (to do transects, for example) or to swim around a point of interest from different angles (to create 3D models or 360 panoramic photos) is equally challenging and takes some serious practice. And even with said practice, we found ourselves having to try and manually correct for invisible currents at various depths. Aerial drones can automatically correct for winds, thanks to GPS.
In many ways, the experience I had in piloting these underwater drones reminded me a lot of what it was like to fly the Phantom 1 when it came out in 2013. It was a very manual experience with a fixed camera. The same is true of the underwater drones. In other words, if you want the camera to capture a particular scene, you had to point the Phantom 1 towards the scene in question and adjust the altitude accordingly, often from hundreds of meters away, which meant quite a bit of guesswork (and luck) until you clocked many hours of practice. The underwater drones have fixed high definition cameras, meaning no gimbals to provide the very smooth footage that the Phantom 4 provides today. What’s more, the cameras of the underwater drones are forward facing. This means you’d need to attach a GoPro or similar camera to the bottom of the underwater drone if you wanted to capture vertical imagery to produce bathymetry maps.
I have no doubt that like the Phantom’s 3 iterations since the first model came out half-a-decade ago, the future iterations of the Trident and PowerRay will make equally important strides. In the meantime, below are some initial recommendations based on our lessons learned. If we’re missing any, then please let us know!
- Practice in a pool: We spent several days practicing in a swimming pool, i.e., a controlled environment. The upside: you can really get the hang of it without dealing with waves, currents, etc. The downside: once you hit the open Ocean, it’s a whole other ballgame.
- You need a crew: In addition to the pilot, a spotter and a “tetherer” are needed. The purpose of the spotter is to provide the pilot with situational awareness, i.e., where the drone is in relation to the pilot and the area of interest. The tetherer is responsible for ensuring that the tether remains loose and untangled. As for the pilot, same deal as manually operating aerial drones: gamers will make for the best pilots. Seasoned divers may potentially feel more at home than others when piloting underwater drones.
- Go slow & Transects: The underwater drones we used allow pilots to select different speeds. Stay on the slow speed when capturing footage. When photographing or filming marine life, we found that simply letting the drone drift produced some of the best results in terms of visual quality. Going to slow is also a good idea if you’re looking to run transects. The key there is to use the live video feed to identify a point in the distance and then to swim as straight as possible towards that point.
- Image quality: You’ll want to play around with the various image settings available for the underwater drones before you go on important dives. The wrong image setting will make the resulting footage look very pale or bleached in some cases. Also, dives on cloudy days and at night tend to produce better image quality given that reflections from the sun are minimized. The underwater drones have powerful forward facing lights that help to illuminate areas of interest.
- Stay away from debris and sand: These can get into the motors and lead to you having a very bad day. In particular, do not “land” your drone on the ocean floor. Sand and drones don’t get along and this is true of both swimming and flying drones.
- Visibility of screen: Just like aerial drones, direct sunlight and screens don’t work well together. Being able to see the screen on your table or smart phone to see the live video feed from your drone along with relevant operational readings such speed, altitude, etc.), is really key. But when you’re out on boat with no “dark room” to properly see the screen, then best of luck to you. We recommend taking a large, thick towel to throw over your head (another reason why a spotter is key) or using the VR Goggles provided with the PowerRay. Towels are also a good idea to thoroughly dry the drone after you take it out of the water and before you start removing the tether.
- Wash, Rinse, Repeat: It’s really important to thoroughly rinse your drone after each day of diving, especially if you’re diving in the Ocean (i.e., salt water).
Based on this experience, here’s what we’d like to see in future iterations of underwater drones:
- Cameras: Marine scientists typically use handheld cameras with 24 megapixels. While the underwater drone cameras are HD, their megapixels is at most 12 (and less when using video). Of course, divers (the human kind) can’t stay too deep for too long whereas the underwater drones can, so yes 12 megapixels is better than nothing. But 24 is still better than 12. In addition, having a gimbal like the ones used in aerial drones to stabilize the footage and enable the pilot to point the drone in different directions without having to change the position of the drone would be a distinct advantage.
- Manual support: More features that support the manual piloting of the drone by providing greater situational awareness—like the compass feature of the Trident—would be a huge plus. As would a better system to manage the tether.
- Feature detection software: To automatically identify specific features that are most commonly of interest, such as identifying and counting specific species of fish and corals, for example.
- Hybrids: There are compelling reasons to integrate underwater drones with surface water drones, i.e., to build a 2-in-1 solution. Surface water drones can be GPS enabled. As such, they can be programmed just like aerial drones. And with a downward facing camera, said surface water drones could automatically create create bathymetry maps by swimming just half a meter or less below the surface (using an extended antennae). Now add a forward facing drone and a tether and you have yourself a diving drone as well.
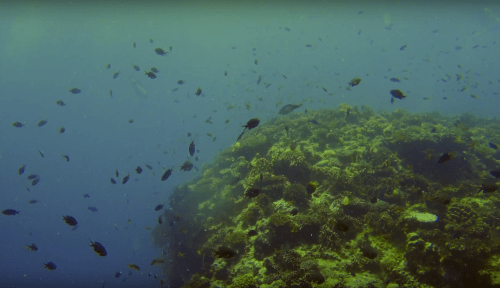
Many thanks to DFAT, Atlassian Foundation, Solve MIT, the University of the South Pacific and OpenROV for their invaluable support and partnership on Pacific Flying Labs. Our labs in Fiji trained young women between the ages of 12-18 years old on how to use these underwater drones to explore the marine life around them and study the health of corals. Pacific Flying Labs will continue to use these underwater drones for a range of projects in the months to come. Below is a short compilation of some of the underwater footage that our Pacific Flying Labs captured with the drones in question. Enjoy!

Fascinating and informative! Not to mention amazing to look back five years and see how far aerial drones have come.
It’s exciting that modern technology can now give us such a unique look at worlds we may never experience otherwise. I would love to see this technology reach classrooms, adding a new level of learning to the classroom, further expanding children’s knowledge and imaginations. Even online teaching platforms could feature interactive drone trips through the ocean, so kids can learn in the moment, as fish swim around their natural habitat. I can’t wait to see what new projects and discoveries come forward from use of these drones!