We’ve just wrapped up an incredible week at the first ever Drones for Good Challenge. Not only was this the first event of its kind in Dubai, it was the first ever such event in the world. I was thus hugely honored to both keynote this outstanding celebration of technologies for good and to also serve on the judging panel for the finalists. Some 800 teams from nearly 60 countries around the world submitted their “Drones for Good” ideas. Only 5 made it to the very final round today. I lived-tweeted the event and curated the list of tweets below as a summary (all original tweets available here). My head is still spinning from all the possibilities, ideas and the incredible innovators that I had the good fortune to meet in person. I’ll absolutely be following up with a number of them for several Humanitarian UAV projects I am working on. In the meantime, huge thanks to the organizing event team for their very kind invitation and friendship!
I’m excited to explore the above possibility with a number of key individuals who I met and spoke with whilst in Dubai.
I had the pleasure of helping co-organize the first UAV/Drone Search and Rescue Challenge in the DC Area last Saturday. This was the first time that members of the DC Area Drone User Group participated in an event like this, so it was an ideal opportunity for everyone involved to better understand how UAVs might be used in a real world emergency to support of professional first responders. The challenge was held at the 65-acre MadCap Farm in The Plains, Virginia. For perspective, 65 acres is equal to about 30 full-size football (soccer) fields.
Satellite view of MadCap Farm above versus aerial view below during the UAV Search and Rescue Challenge.
Big thanks to our host and to Timothy Reuter who organized and ran the challenge; and of course many thanks indeed to all five teams who participated in the challenge. One colleague even flew in from Texas to compete in the event, which was sponsored by UAViators, the Humanitarian UAV Network. I described the rules of the challenge in this post but let me briefly summarize these here. Teams were notified of the following “alert” the night before the challenge:
“We have received reports of three lost campers in the vicinity of MadCap Farms. Local Search & Rescue professionals have requested our help to find them. Please report to the front field of MadCap no later than 9:15am for additional details on the campers and efforts to locate them. You will receive a laminated map of the area upon your arrival as well as a wax pen. We ask that you use your drones to identify objects that may help local responders determine where the campers are and ideally find the campers themselves. You will mark on the maps you receive what items you find, their color, and any people you identify. If any of the campers are trapped, you may need to deliver some form of medicine or other relief to them in advance of first responders being able to aid them in person.”
Upon reporting to the farm the following morning, the teams (pictured above) were notified that the campers were teenagers who were carrying sleeping bags and tents. In reality, our three lost campers were the cardboard stand-ups below, but Timothy had already hidden these and scattered their belongings by the time participants arrived at the farm. By the way, notice all the clouds in the picture above? This would have hampered efforts to use satellite imagery in the search and rescue efforts. UAVs, in contrast, fly below the cloud canopy and can provide far cheaper and more up-to-date imagery at far higher spatial resolutions and available even using the best commercial satellites.
As a side note, I was really pleased to see the Civilian Air Patrol (CAP) at the Search and Rescue Challenge. The Air Patrol is a federally supported non-profit volunteer-based organization that serves as the official civilian auxiliary of the US Air Force. CAP members share a passion for aviation and come from all backgrounds and walks of life.
Back to the Challenge. Each team had an hour to fly their UAVs and another hour to search through their aerial videos and/or images post-flight. Two of the five teams used fixed-wing UAVs, like the group below, which kicked off our Search & Rescue Challenge.
They decided to program their UAV for autonomous flight. You can see the flight path below with specified altitude and the different way points (numbers) in the top-right screen (click to enlarge).
Here’s a short 20-second video of the hand-held launch of the fixed-wing UAV. Once airborne, the team simply switches to auto-pilot and the UAV does the rest, accurately following the pre-programmed flight path.
The team decided to analyze their streaming aerial video in real-time, as you can observe in the second video below. While this certainly expedites the analysis and the search for the missing campers, it is also challenging since the team has to pivot back and forth between the live video and the flight path of the UAV in order to pin-point the location of a potential camper or their tent. Unlike rotary-wing UAVs, fixed-wing UAVs obviously cannot hover over one area but need to circle back to fly over the same area.
My colleague Michael and his co-pilot programmed a quadcopter to fly to designated waypoints at a specified altitude. They too used live-streaming to look for clues that could reveal the location of the three missing campers. But they also recorded the video-feed for later analysis, which proved far more effective at identifying said clues. In any event, they used First Person View (FPV) goggles to see exactly what the quadcopter’s camera was seeing, as depicted below.
In addition to searching for the whereabouts of the missing campers, Timothy and I decided to add a bit more focus on the “rescue” part of Search & Rescue. My colleague Euan kindly gave us a number of his new payload units, which are basically a pair of magnets that can be demagnetized by passing a small electric current through said magnets, thus acting as a release mechanism. Euan posted this short video of his prototype payload units in action during a first test earlier this year. Competing teams could earn additional points if they were able to carry a small payload (of their choice) and release this near any of the cardboard stand-ups they could find.
Some teams used Euan’s units while other used their own, like the device pictured above. Here’s a short video of payload release (with parachute) during the competition.
At the end of the competition, we all came together for a full debrief and of course to count up points. Timothy asked each team to share what they felt went well and what some of the major challenges were. The picture below shows some of the items (sleeping bags, clothing, etc.) that were scattered around the farm.
Perhaps the single biggest challenge was altitude. Given that we were in a valley surrounded by rolling hills, it was difficult for competing teams to judge at what altitude their UAVs should be programmed to fly since we couldn’t see over the next hill to determine whether there were taller trees in the distance.
Flying too high would make it more difficult to identify the potential campers on the ground while flying too low would mean running into trees. Unfortunately, two teams encountered the latter problem but both UAVs were eventually recovered. This highlights the importance of developing automatic collision avoidance systems (ACAS) specifically for UAVs. In addition, if UAVs are to be used for Search and Rescue efforts in forested areas, it would pay to have a back-up quadcopter to rescue any UAVs caught in taller trees. One could attach a hanger to said quadcopter to unhook UAVs out of trees. The picture below is taken by a camera fixed to a quadcopter that hit the top of a tree. Yes, we all had a good laugh about the irony of sending UAVs to rescue other UAVs.
The debrief also revealed that most teams were able to find more items post-flight after going through their recorded video footage. My colleague Michael noted that finding signs of the campers was “like looking for a needle in a haystack.” One team noted that live video feeds have a limited range, which hampered their efforts. Another team remarked that one can never have enough batteries on hand. Indeed, wind conditions can very easily affect the endurance of UAV batteries, for example. The importance of pre-flight check-lists was reiterated as well as clearly spelling out safety protocols before a challenge.
I’ll be sharing this debrief and lessons learned with my humanitarian colleagues at the United Nations and the Red Cross; as well as with members of the Advisory Board of the Humanitarian UAV Network (UAViators). Keep in mind that groups like UNICEF, UNHCR and the UN Office for the Coordination for Humanitarian Affairs (OCHA) have not yet begun to experiment hands-on with UAVs to support their relief efforts, so all of the above will be very new to them, just as it was to most teams who participated in the challenge. So this kind of hands-on learning will be of interest to humanitarians groups looking to explore this space.
We counted up the points from each team’s map (like the one above) after the debrief and congratulated the winning team pictured below. They were the only team that found all three missing campers along with some of their belongings.
Big thanks again to our hosts at MadCap Farm, to Timothy Reuter and all participants for spending a fun Saturday outdoors trying something new. We certainly learned some valuable lessons and in the process made new friends.
The short video above was produced by CCTV America, a news television channel that reported on the Search & Rescue Challenge.
Acknowledgements: Many thanks to Timothy Reuter and Michael Ender for their feedback on an earlier draft of this blog post.
See also:
How UAVs are Making a Difference in Disaster Response [link]
Humanitarians Using UAVs for Post Disaster Recovery [link]
My colleague Timothy Reuter (of AidDroids fame) kindly invited me to co-organize the Drone/UAV Search and Rescue Challenge for the DC Drone User Group. The challenge will take place on May 17th near Marshall in Virginia. The rules for the competition are based on the highly successful Search/Rescue challenge organized by my new colleague Chad with the North Texas Drone User Group. We’ll pretend that a person has gone missing by scattering (over a wide area) various clues such as pieces of clothing & personal affects. Competitors will use their UAVs to collect imagery of the area and will have 45 minutes after flying to analyze the imagery for clues. The full set of rules for our challenge are listed here but may change slightly as we get closer to the event.
I want to try something new with this challenge. While previous competitions have focused exclusively on the use of drones/UAVs for the “Search” component of the challenge, I want to introduce the option of also engaging in the “Rescue” part. How? If UAVs identify a missing person, then why not provide that person with immediate assistance while waiting for the Search and Rescue team to arrive on site? The UAV could drop a small and light-weight first aid kit, or small water bottle, or even a small walkie talkie. Enter my new colleague Euan Ramsay who has been working on a UAV payloader solution for Search and Rescue; see the video demo below. Euan, who is based in Switzerland, has very kindly offered to share several payloader units for our UAV challenge. So I’ll be meeting up with him next month to take the units back to DC for the competition.
Another area I’d like to explore for this challenge is the use of crowdsourcing to analyze the aerial imagery & video footage. As noted here, the University of Central Lancashire used crowdsourcing in their UAV Search and Rescue pilot project last summer. This innovative “crowdsearching” approach is also being used to look for Malaysia Flight 370 that went missing several weeks ago. I’d really like to have this crowdsourcing element be an option for the DC Search & Rescue challenge.
My team and I at QCRI have developed a platform called MicroMappers, which can easily be used to crowdsource the analysis of UAV pictures and videos. The United Nations (OCHA) used MicroMappers in response to Typhoon Yolanda last year to crowdsource the tagging pictures posted on Twitter. Since then we’ve added video tagging capability. So one scenario for the UAV challenge would be for competitors to upload their imagery/videos to MicroMappers and have digital volunteers look through this content for clues of our fake missing person.
In any event, I’m excited to be collaborating with Timothy on this challenge and will be share updates on iRevolution on how all this pans out.
UAVs (or drones) are starting to be used for search & rescue operations, such as in the Philippines following Typhoon Yolanda a few months ago. They are also used to find missing people in the US, which may explain why members of the North Texas Drone User Group (NTDUG) are organizing the (first ever?) Search & Rescue challenge in a few days. The purpose of this challenge is to 1) encourage members to build better drones and 2) simulate a real world positive application of civilian drones.
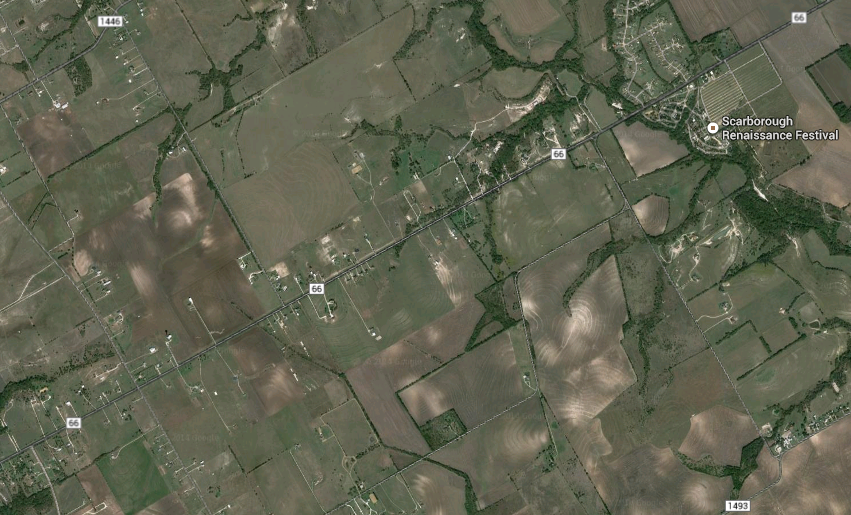
Nine teams have signed up to compete in Saturday’s challenge, which will be held in a wheat field near Renaissance Fair in Waxahachie, Texas (satellite image below). The organizers have already sent these teams a simulated missing person’s report. This will include a mock photo, age, height, hair color, ethnicity, clothing and where/when this simulated lost person was last seen. Each drone must have a return to home function and failsafe as well as live video streaming.
When the challenge launches, each team will need to submit a flight plan to the contest’s organizers before being allowed to search for the missing items (at set times). An item is considered found when said item’s color or shape can be described and if the location of this item can be pointed to on a Google Map. These found objects then count as points. Points are also awarded for finding tracks made by humans or animals, for example. Points will be deducted for major crashes, for flying at an altitude above the 375 feet limit and risk disqualification for flying over people.
While I can’t make it to Waxahachie this weekend to observe the challenge first-hand, I’m thrilled that the DC Drones group (which I belong to), is preparing to host its own drones search & rescue challenge this Spring. So I hope to be closely involved with this event in the coming months.
Although search & rescue is typically thought of as searching for people, UAVs are also beginning to appear in conversations about anti-poaching operations. At the most recent DC Drones MeetUp, we heard a presentation on the first ever Wildlife Conservation UAV Challenge (wcUAVc). The team has partnered with Krueger National Park to support their anti-poaching efforts in the face of skyrocketing Rhino poaching.
The challenge is to “design low cost UAVs that can be deployed over the rugged terrain of Kruger, equipped with sensors able to detect and locate poachers, and communications able to relay accurate and timely intelligence to Park Rangers.” In addition, the UAVs will have to “collect RFID tag data throughout the sector; detect, classify, and tack all humans; regularly report on the location of all rhinos and humans; and receive commands to divert from general surveillance to support poacher engagement anywhere in the sector. They also need to be able to safely operate in same air space with manned helicopters, assisting special helicopter borne rangers engage poachers.” All this for under $3,000.
Why RFID tag data? Because rangers and tourists in Krueger National Park all carry RFID tags so they can be easily located. If a UAV automatically detects a group of humans moving through the bush and does not find an RFID signature for them, the UAV will automatically conclude that they may be poachers. When I spoke with one of the team members following the presentation, he noted that they were also interested in having UAVs automatically detect whether humans are carrying weapons. This is no small challenge, which explains why the total cash prize is $65,000 and an all-inclusive 10-day trip to Krueger National Park for the winning team.
I think it would be particularly powerful if the team could open up the raw footage for public analysis via microtasking, i.e., include a citizen science component to this challenge to engage and educate people from around the world about the plight of rhinos in South Africa. Participants would be asked to tag imagery that show rhinos and humans, for example. In so doing, they’d learn more about the problem, thus becoming better educated and possibly more engaged. Perhaps something along the lines of what we do for digital humanitarian response, as described here.
In any event, I’m a big proponent of using UAVs for positive social impact, which is precisely why I’m honored to be an advisor for the (first ever?) Drones Social Innovation Award. The award was set up by my colleague Timothy Reuter (founder of the the Drone User Group Network, DUGN). Timothy is also launching a startup, AirDroids, to further democratize the use of micro-copters. Unlike similar copters out there, these heavy-lift AirDroids are easier to use, cheaper and far more portable.
As more UAVs like AirDroids hit the market, we will undoubtedly see more and more aerial photo- and videography uploaded to sites like Flickr and YouTube. Like social media, I expect such user-generated imagery to become increasingly useful in humanitarian response operations. If users can simply slip their smartphones into their pocket UAV, they could provide valuable aerial footage for rapid disaster damage assessments purposes, for example. Why smart-phones? Because people already use their smartphones to snap pictures during disasters. In addition, relatively cheap hardware add-on’s can easily turn smartphones for LIDAR sensing and thermal imaging.
All this may eventually result in an overflow of potentially useful aerial imagery, which is where MicroMappers would come in. Digital volunteers could easily use MicroMappers to quickly tag UAV footage in support of humanitarian relief efforts. Of course, UAV footage from official sources will also continue to play a more important role in the future (as happened following Hurricane Sandy). But professional UAV teams are already outnumbered by DIY UAV users. They simply can’t be everywhere at the same time. But the crowd can. And in time, a bird’s eye view may become less important than a flock’s eye view, especially for search & rescue and rapid disaster assessments.
See also:
How UAVs are Making a Difference in Disaster Response [link]
Social media is increasingly used for communicating during crises. This rise in Big (Crisis) Data means that finding the proverbial needle in the growing haystack of information is becoming a major challenge. Social media use during Hurricane Sandy produced a “haystack” of half-a-million Instagram photos and 20 million tweets. But which of these were actually relevant for disaster response and could they have been detected in near real-time? The purpose of QCRI’s experimental Twitter Dashboard for Disaster Response project is to answer this question. But what about the credibility of the needles in the info-stack?
To answer this question, our Crisis Computing Team at QCRI has partnered with the Social Computing & Artificial Intelligence Lab at the Masdar Institute of Science and Technology. This applied research project began with a series of conversations in mid-2012 about DARPA’s Red Balloon Challenge. This challenge posted in 2009 offered $40K to the individual or team that could find the correct location of 10 red weather balloons discretely placed across the continental United States, an area covering well over 3 million square miles (8 million square kilometers). My friend Riley Crane at MIT spearheaded the team that won the challenge in 8 hours and 52 minutes by using social media.
Riley and I connected right after the Haiti Earthquake to start exploring how we might apply his team’s winning strategy to disaster response. But we were pulled in different directions due to PhD & post-doc obligations and start-up’s. Thank-fully, however, Riley’s colleague Iyad Rahwan got in touch with me to continue these conversations when I joined QCRI. Iyad is now at the Masdar Institute. We’re collaborating with him and his students to apply collective intelligence insights from the balloon to address the problem of false or misleading content shared on social media during disasters.
If 10 balloons planted across 3 million square miles can be found in under 9 hours, then surely the answer to the question “Did Hurricane Sandy really flood this McDonald’s in Virginia?” can be found in under 9 minutes given that Virginia is 98% smaller than the “haystack” of the continental US. Moreover, the location of the restaurant would already be known or easily findable. The picture below, which made the rounds on social media during the hurricane is in reality part of an art exhibition produced in 2009. One remarkable aspect of the social media response to Hurricane Sandy was how quickly false information got debunked and exposed as false—not only by one good (digital) Samaritan, but by several.
Having access to accurate information during a crisis leads to more targeted self-organized efforts at the grassroots level. Accurate information is also important for emergency response professionals. The verification efforts during Sandy were invaluable but disjointed and confined to the efforts of a select few individuals. What if thousands could be connected and mobilized to cross-reference and verify suspicious content shared on social media during a disaster?
Say an earthquake struck Santiago, Chile a few minutes ago and contradictory reports begin to circulate on social media that the bridge below may have been destroyed. Determining whether transportation infrastructure is still useable has important consequences for managing the logistics of a disaster response opera-tion. So what if instead of crowdsourcing the correct location of balloons across an entire country, one could crowdsource the collection of evidence in just one city struck by a disaster to determine whether said bridge had actually been destroyed in a matter of minutes?
To answer these questions, QCRI and Masdar have launched an experimental platform called Verily. We are applying best practices in time-critical crowd-sourcing coupled with gamification and reputation mechanisms to leverage the good will of (hopefully) thousands of digital Samaritans during disasters. This is experimental research, which means it may very well not succeed as envisioned. But that is a luxury we have at QCRI—to innovate next-generation humanitarian technologies via targeted iteration and experimentation. For more on this project, our concept paper is available as a Google Doc here. We invite feedback and welcome collaborators.
In the meantime, we are exploring the possibility of integrating the InformCam mobile application as part of Verily. InformaCam adds important metadata to images and videos taken by eyewitnesses. “The metadata includes information like the user’s current GPS coordinates, altitude, compass bearing, light meter readings, the signatures of neighboring devices, cell towers, and wifi net-works; and serves to shed light on the exact circumstances and contexts under which the digital image was taken.” We are also talking to our partners at MIT’s Computer Science & Artificial Intelligence Lab in Boston about other mobile solutions that may facilitate the use of Verily.
Again, this is purely experimental and applied research at this point. We hope to have an update on our progress in the coming months.
See also:
• Crowdsourcing Critical Thinking to Verify Social Media During Crises [Link] • Using Crowdsourcing to Counter Rumors on Social Media [Link]
I thrive when working across disciplines, building diverse cross-cutting coalitions to create, translate and apply innovative strategies driven by shared values. This has enabled the 20+ organizations I’ve worked with, and those I’ve led, to accelerate meaningful and inclusive social impact.
Which is why I've been called a social entrepreneur and a translational leader by successful innovators. President Clinton once called me a digital pioneer, while recent colleagues describe me as kind, dedicated, values-driven, authentic, creative, ethical, and impactful.