WeRobotics is co-creating a global network of labs to transfer robotics solutions to those who need them most. These “Flying Labs” take on different local flavors based on the needs and priorities of local partners. Santiago Flying Labs is one of the labs under consideration. Our local partners in Chile are interested in the application of robotics for disaster preparedness and Search & Rescue (SaR) operations. So what is the state of the art in rescue robotics?

One answer may lie several thousand miles away in Lushan, China, which experienced a 7.0 magnitude earthquake in 2013. The mountainous area made it near impossible for the Chinese International Search and Rescue Team (CISAR) to implement a rapid search and post-seismic evaluation. So State Key Robotics Lab at Shenyang Institute of Automation offered aerial support to CISAR. They used their aerial robot (UAV) to automatically and accurately detect collapsed buildings for ground rescue guidance. This saved the SaR teams considerable time. Here’s how.

A quicker SaR response leads to a higher survival rate. The survival rate is around 90% within the first 30 minutes but closer to 20% by day four. “In traditional search methods, ground rescuers are distributed to all possible places, which is time consuming and inefficient.” An aerial inspection of the disaster damage can help accelerate the ground search for survivors by prioritizing which areas to search first.

State Key Labs used a ServoHeli aerial robot to capture live video footage of the damaged region. And this is where it gets interesting. “Because the remains of a collapsed building often fall onto the ground in arbitrary directions, their shapes will exhibit random gradients without particular orientations. Thus, in successive aerial images, the random shape of a collapsed building will lead to particular motion features that can be used to discriminate collapsed from non-collapsed buildings.”

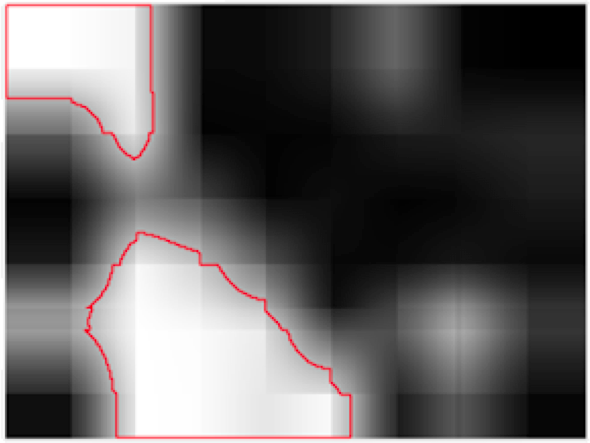
These distinct motion features can be quantified using a histogram of oriented gradient (HOG) as depicted here (click to enlarge):

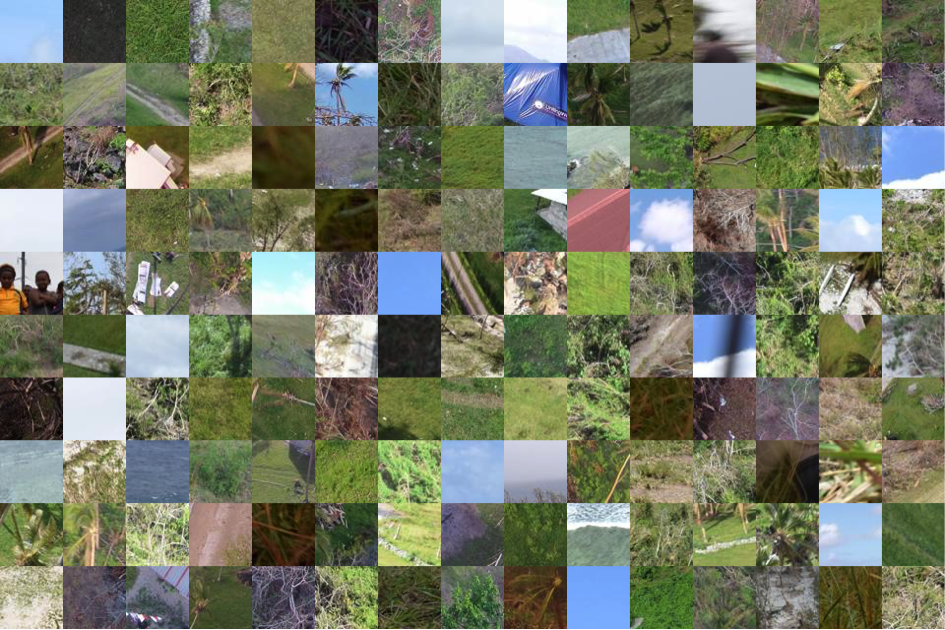
As is clearly evident from the histograms, the “HOG variation of a normal building will be much larger than that of a collapsed one.” The team at State Key Labs had already employed this technique to train and test their automated feature-detection algorithm using aerial video footage from the 2010 Haiti Earthquake. Sample results of this are displayed below. Red rectangles denote where the algorithm was successful in identifying damage. Blue rectangles are false alarms while orange rectangles are missed detections.



While the team achieved increasingly accurate detection rates for Haiti, the initial results for Lushan were not as robust. This was due to the fact that Lushan is far more rural than Port-au-Prince, which tripped up the algorithm. Eventually, the software achieved an accurate rate of 83.4% without any missed collapses, however. The use of aerial robotics and automated feature detection algorithms in Xinglong Village (9.5 sq. km) enabled CISAR to cut their search time in half. In sum, the team concluded that videos are more valuable for SaR operations than static images.


To learn more about this deployment, see the excellent write-up “Search and Rescue Rotary-Wing UAV and Its Application to the Lushan Ms 7.0 Earthquake” published in the Journal of Field Robotics. I wish all robotics deployments were this well documented. Another point that I find particularly noteworthy about this operation is that it was conducted three years ago already. In other words, real-time feature detection of disaster damage from live aerial video footage was already used operationally years ago.

What’s more, this paper published in 2002 (!) used computer vision to detect with a 90% accuracy rate collapsed buildings in aerial footage of the 1995 Kobe earthquake captured by television crews in helicopters. Perhaps in the near future we’ll have automated feature detection algorithms for disaster damage assessments running on live video footage from news channels and aerial robots. These could then be complemented by automated change-detection algorithms running on satellite imagery. In any event, the importance of applied research is clearly demonstrated by the Lushan deployments. This explains why WeRobotics
always aims to have local universities involved in Flying Labs.
Thanks to the ICARUS Team for pointing me to this deployment.