Island life can be rough for flying robots. They have to contend with sandy beaches, sea salt, overbearing heat, humidity, high winds and rapidly changing weather patterns featuring sudden downpours. Birds of prey can also be a major menace for flying robots. While these aren’t exactly the types of problems one typically comes across at humanitarian innovation labs in New York, Geneva or Singapore, they’re part of everyday life for our Tanzania Flying Labs and partners like the State University of Zanzibar (SUZA). When team and I at WeRobotics were in Tanzania last month to continue building the local capacity of our Flying Labs, I had the opportunity to learn first hand from our Tanzanian friends about how they hack robotics solutions to survive island life.
Birds of prey are no joke when their airspace is invaded. I’ve experienced this several times while flying robots (UAVs/drones) over the past four years. The aerial photograph above, for example, was taken about 2 years ago in South Africa. I raced to land my UAV as soon as I spotted the eagle but the bird came in for attack nonetheless. I was seriously worried that the eagle would be injured but luckily it swerved away at the last second.
Turns out birds of prey are a problem for many UAV pilots around the world. According to senseFly, a leading UAV manufacturer, bird strikes against UAVs are “surprisingly common and occur in many parts of the world; not only in Australia but also parts of Africa, select US states, parts of Europe and in Latin America.” Our Tanzanian team and partners face similar challenges when flying in Zanzibar, with some of their UAVs no longer operational after encounters with birds of prey. So they’ve tried a number of different tactics and the one that seems to work the best for now is deceivingly simple.
I found about this while looking over the shoulder of my colleague Khadija as she was prepared a third UAV for flight. I hadn’t seen aluminum foil on a flying robot before and couldn’t figure out what it was for. So I asked Khadija, who explained: “This is to keep the birds away; they don’t like it when we invade their airspace, they were there first, after all. So we simply tape some foil to a wing, which shines and keeps the birds away.” Perhaps the eagles realize that birds aren’t supposed to shine, so they keep their distance. Now, this isn’t exactly a sexy solution by any means, and it barely costs 25 cents, but it works.
Humanitarian technology doesn’t have to be shiny or expensive, it just has to work. Another simple way that our Zanzibari friends are hacking UAV flights to help robots cope with island life has to do with the orange tarp below.
When aerial robots land on sand, the grains can wreck havoc on the motors, cameras and sensors. This is especially true if you’re flying (and landing) several times a day for many weeks on end. It’s also worth noting that non-sandy landing sites can be quite few and far between in some parts of the island. So our local colleagues have been experimenting with fishing nets and most recently tarps in order to catch the robots as they come in for landing. They’re still working on refining this technique as this video shows:
Have you come across other examples of local adaptations of robotics/UAV technology in Africa, Asia or Latin America? If so, I’d really like to hear from you so I can share them with our growing network of Flying Labs. Thank you!
In September 2015, we were invited by our partner Kathmandu University to provide them and other key stakeholders with professional hands-on training to help them scale the positive impact of their humanitarian efforts following the devastating earthquakes. More specifically, our partners were looking to get trained on how to use aerial robotics solutions (drones) safely and effectively to support their disaster risk reduction and early recovery efforts. So we co-created Kathmandu Flying Labs to ensure the long-term sustainability of our capacity building efforts. Kathmandu Flying Labs is kindly hosted by our lead partner, Kathmandu University (KU). This is already well known. What is hardly known, however, is what happened after we left the country.
Our Flying Labs are local innovation labs used to transfer both relevant skills and appropriate robotics solutions sustainably to outstanding local partners who need these the most. The co-creation of these Flying Labs include both joint training and applied projects customized to meet the specific needs & priorities of our local partners. In Nepal, we provided both KU and Kathmandu Living Labs (KLL) with the professional hands-on training they requested. What’s more, thanks to our Technology Partner DJI, we were able to transfer 10 DJI Phantoms (aerial robotics solutions) to our Nepali partners (6 to KU and 4 to KLL). In addition, thanks to another Technology Partner, Pix4D, we provided both KU and KLL with free licenses of the Pix4D software and relevant training so they could easily process and analyze the imagery they captured using their DJI platforms. Finally, we carried out joint aerial surveys of Panga, one of the towns hardest-hit by the 2015 Earthquake. Joint projects are an integral element of our capacity building efforts. These projects serve to reinforce the training and enable our local partners to create immediate added value using aerial robotics. This important phase of Kathmandu Flying Labs is already well documented.
What is less known, however, is what KU did with the technology and software after we left Nepal. Indeed, the results of this next phase of the Flying Labs process (during which we provide remote support as needed) has not been shared widely, until now. KU’s first order of business was to actually finish the joint project we had started with them in Panga. It turns out that our original aerial surveys there were actually incomplete, as denoted by the red circle below.
But because we had taken the time to train our partners and transfer both our skills and the robotics technologies, the outstanding team at KU’s School of Engineering returned to Panga to get the job done without needing any further assistance from us at WeRobotics. They filled the gap:
The KU team didn’t stop there. They carried out a detailed aerial survey of a nearby hospital to create the 3D model below (at the hospital’s request). They also created detailed 3D models of the university and a nearby temple that had been partially damaged by the 2015 earthquakes. Furthermore, they carried out additional disaster damage assessments in Manekharka and Sindhupalchowk, again entirely on their own.
Yesterday, KU kindly told us about their collaboration with the World Wildlife Fund (WWF). Together, they are conducting a study to determine the ecological flow of Kaligandaki river, one of the largest rivers in Nepal. According to KU, the river’s ecosystem is particularly “complex as it includes aquatic invertebrates, flora, vertebrates, hydrology, geo-morphology, hydraulics, sociology-cultural and livelihood aspects.” The Associate Dean at KU’s School of Engineering wrote “We are deploying both traditional and modern technology to get the information from ground including UAVs. In this case we are using the DJI Phantoms,” which “reduced largely our field investigation time. The results are interesting and promising.” I look forward to sharing these results in a future blog post.
Lastly, KU’s Engineering Department has integrated the use of the robotics platforms directly into their courses, enabling Geomatics Engineering students to use the robots as part of their end-of-semester projects. In sum, KU has done truly outstanding work following our capacity building efforts and deserve extensive praise. (Alas, it seems that KLL has made little to no use of the aerial technologies or the software since our training 10 months ago).
Several months after the training in Nepal, we were approached by a British company that needed aerial surveys of specific areas for a project that the Nepal Government had contracted them to carry out. So they wanted to hire us for this project. We proposed instead that they hire our partners at Kathmandu Flying Labs since the latter are more than capable to carry out the surveys themselves. In other words, we actively drive business opportunities to Flying Labs partners. Helping to create local jobs and local businesses around robotics as a service is one of our key goals and the final phase of the Flying Labs framework.
So when we heard last week that USAID’s Global Development Lab was looking to hire a foreign company to carry out aerial surveys for a food security project in Nepal, we jumped on a call with USAID to let them know about the good work carried out by Kathmandu Flying Labs. We clearly communicated to our USAID colleagues that there are perfectly qualified Nepali pilots who can carry out the same aerial surveys. USAID’s Development Lab will be meeting with Kathmandu Flying Labs during their next visit in September.
On a related note, one of the participants who we trained in September was hired soon after by Build Change to support the organization’s shelter programs by producing Digital Surface Models (DSMs) from aerial images captured using DJI platforms. More recently, we heard from another student who emailed us with the following: “I had an opportunity to participate in the Humanitarian UAV Training mission in Nepal. It’s because of this training I was able learn how to fly drones and now I can conduct aerial Survey on my own with any hardware. I would like to thank you and your team for the knowledge transfer sessions.”
This same student (who graduated from KU) added: “The workshop that your team did last time gave us the opportunity to learn how to fly and now we are handling some professional works along with major research. My question to you is ‘How can young graduates from developing countries like ours strengthen their capacity and keep up with their passion on working with technology like UAVs […]? The immediate concern for a graduate in Nepal is a simple job where he can make some money for him and prove to his family that he has done something in return for all the investments they have been doing upon him […]’.
This is one of several reasons why our approach at WeRobotics is not limited to scaling the positive impact of local humanitarian, development, environmental and public health projects. Our demand-driven Flying Labs model goes the extra (aeronautical) mile to deliberately create local jobs and businesses. Our Flying Labs partners want to make money off the skills and technologies they gain from WeRobotics. They want to take advantage of the new career opportunities afforded by these new AI-powered robotics solutions. And they want their efforts to be sustainable.
In Nepal, we are now interviewing the KU graduate who posed the question above because we’re looking to hire an outstanding and passionate Coordinator for Kathmandu Flying Labs. Indeed, there is much work to be done as we are returning to Nepal in coming months for three reasons: 1) Our local partners have asked us to provide them with the technology and training they need to carry out large scale mapping efforts using long-distance fixed-wing platforms; 2) A new local partner needs to create very high-resolution topographical maps of large priority areas for disaster risk reduction and planning efforts, which requires the use of a fixed-wing platform; 3) We need to meet with KU’s Business Incubation Center to explore partnership opportunities since we are keen to help incubate local businesses that offer robotics as a service in Nepal.
I had the honor of spearheading this disaster recovery UAV mission in Nepal a few weeks ago as part of Kathmandu Flying Labs. I’ve been working on this new initiative (in my own time) with Kathmandu Living Labs (KLL), Kathmandu University (KU), DJI and Pix4D. This Flying Lab is the first of several local UAV innovation labs that I am setting up (in my personal capacity and during my holiday time) with friends and colleagues in disaster-prone countries around the world. The short film documentary above was launched just minutes ago by DJI and describes how we teamed up with local partners in Kathmandu to make use of aerial robotics (UAVs) to map Nepal’s recovery efforts.
Here are some of the 3D results, courtesy of Pix4D (click to enlarge):
Since most of our local partners in Nepal don’t have easy access to computers or VR headsets, I found another way to unlock and liberate this digital data by printing our high-resolution maps on large, rollable banners.
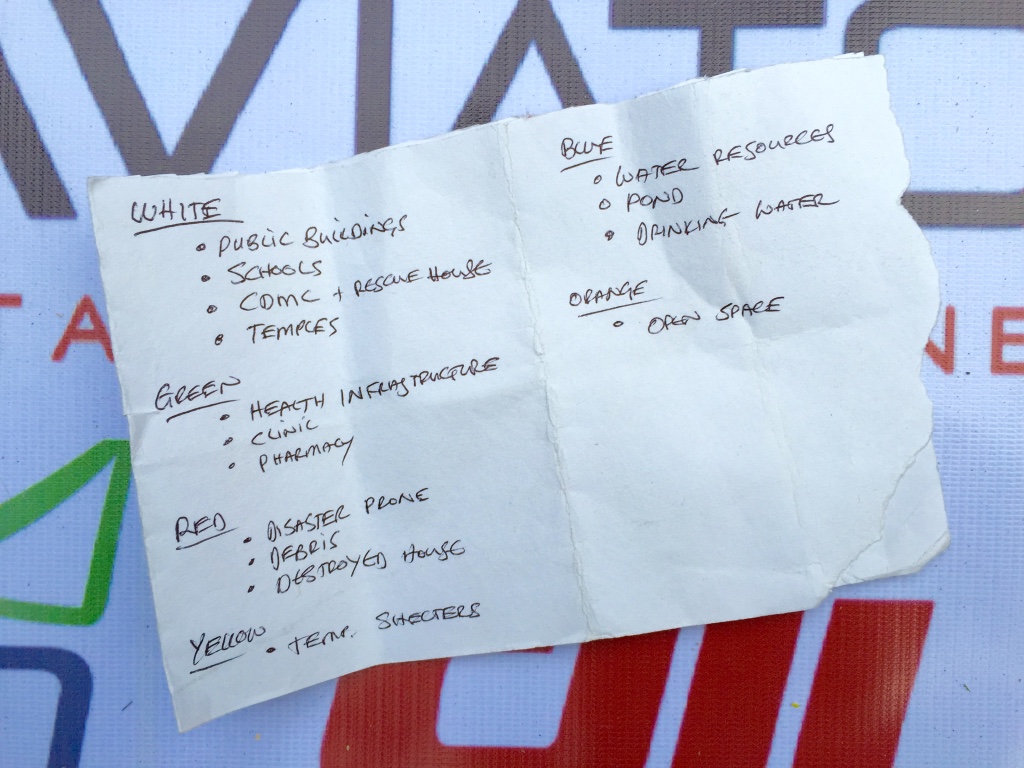
We brought these banner maps back to the local community and invited them to hack the map. How? Directly, by physically adding their local knowledge to the map; knowledge about the location of debris, temporary shelters, drinking water and lots more. We brought tape and color-coded paper with us to code this knowledge so that the community could annotate the map themselves.
In other words, we crowdsourced a crisis map of Panga, which was highly participatory. The result was a rich, contextual social layer on top of the base map, which further inform community discussions on strategies and priorities guiding their recovery efforts. For the first time ever, the community of Panga was working off the one and same dataset to inform their rebuilding. In short, our humanitarian mission combined aerial robotics, computer vision, water-proof banners, local knowledge, tape, paper and crowdsourcing to engage local communities on the reconstruction process.
I’m now spending my evenings & weekends working with friends and colleagues to plan a follow-up mission in early 2016. We’ll be returning to Kathmandu Flying Labs with new technology partners to train our local partners on how to use fixed-wing UAVs for large scale mapping efforts. In the meantime, we’re also exploring the possibility of co-creating Jakarta Flying Labs, Monrovia Flying Labs and Santiago Flying Labs in 2016.
I’m quitting my day job next week to devote myself full time to these efforts. Fact is, I’ve been using all of my free time (meaning evenings, weekends and many, many weeks of holiday time) to pursue my passion in aid robotics and to carry out volunteer-based UAV missions like the one in Nepal. I’ve also used holiday time (and my own savings) to travel across the globe to present this volunteer-work at high-profile events, such as the 2015 Web Summit here in Dublin where the DJI film documentary was just publicly launched.
My Nepali friends & I need your help to make sure that Kathmandu Flying Labs take-off and become a thriving and sustainable center of social entrepreneur-ship. To this end, we’re actively looking for both partners and sponsors to make all this happen, so please do get in touch if you share our vision. And if you’d like to learn more about how UAVs & other emerging technologies are changing the face of humanitarian action, then check out my new book Digital Humanitarians.
In the meantime, big, big thanks to our Nepali partners and technology partners for making our good work in Kathmandu possible!
I thrive when working across disciplines, building diverse cross-cutting coalitions to create, translate and apply innovative strategies driven by shared values. This has enabled the 20+ organizations I’ve worked with, and those I’ve led, to accelerate meaningful and inclusive social impact.
Which is why I've been called a social entrepreneur and a translational leader by successful innovators. President Clinton once called me a digital pioneer, while recent colleagues describe me as kind, dedicated, values-driven, authentic, creative, ethical, and impactful.