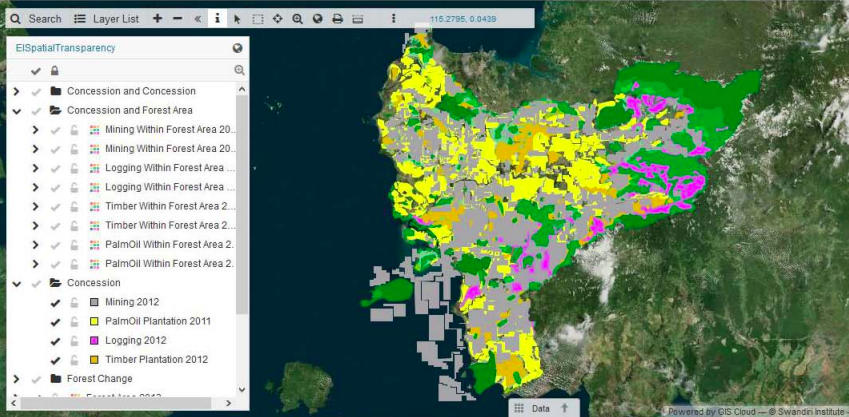
Want a piece of Indonesia? The country’s government is busy implementing an “accelerated development program” in which “different provinces are assigned different development foci,” like “food and energy for Papua, palm oil processing for North Sumatra, mining for Central Kalimantan etc.” Critics describe this program as “a national, state-coordinated program of land grabs.” An important component of “this development plan is the commoditization of space by spatial planning,” which is “supposed to be open, transparent and participatory.” The reality is very different. “Maps are made by consultants and government offices favoring the interests of capital and local elites.” As a result, “concessions are given mostly without the consent (and often without the knowledge) of local communities.” These quotes are taken from a brilliant new study (PDF) written by Irendra Radjawali and Oliver Pye. The study describes the use of Unmanned Aerial Vehicles (UAVs) to “generate high-quality community controlled maps to challenge spatial planning from above,” which is “revolutionizing the counter-mapping movement in Indonesia.”

“Challenging state power over maps and its categorization of land uses by counter-mapping indigenous and local claims to territory has developed into an important movement in Indonesia.” As the authors of the new study rightly note, “Mapping needs to be understood as a political process rather than a merely technical tool. Mapping is not only an act of how to produce maps, it is important to always ask who produces the maps, how people can access the maps and how the maps can be used for emancipatory purposes.” Counter-mapping is thus a political process as well. And this counter-mapping movement is now experimenting with “grassroots UAVs” (or community drones) to bolster their political actions.
Activists in Indonesia initially used their UAV to capture “high quality and high-resolution spatial data in areas where access was restricted by company security and police.” Where exactly did they get their UAV from? They built one from scratch: “Irendra Radjawali built the first drone without any former training, by using the Internet and the online forum. He also sourced much of the material second hand via ebay.” The advantage of this DIY approach is the relatively low costs involved. This UAV, coupled with a mapping camera, came to just over USD 500.

Irendra and team subsequently few their UAVs over oil palm plantations where a company had taken lands from local communities who had no idea that their lands had been parceled off to said company. The team managed to fly their UAVs “at several places, capturing several community’s areas which have been grabbed by the company, including the customary area.” It is worth emphasizing that “community members very rarely have access to the spatial plan documents, and so could hardly ever actively participate in the spatial planning process. The opportunity to produce high-quality and precise maps is seen by community members as the chance to claim and to re-claim their lands.”
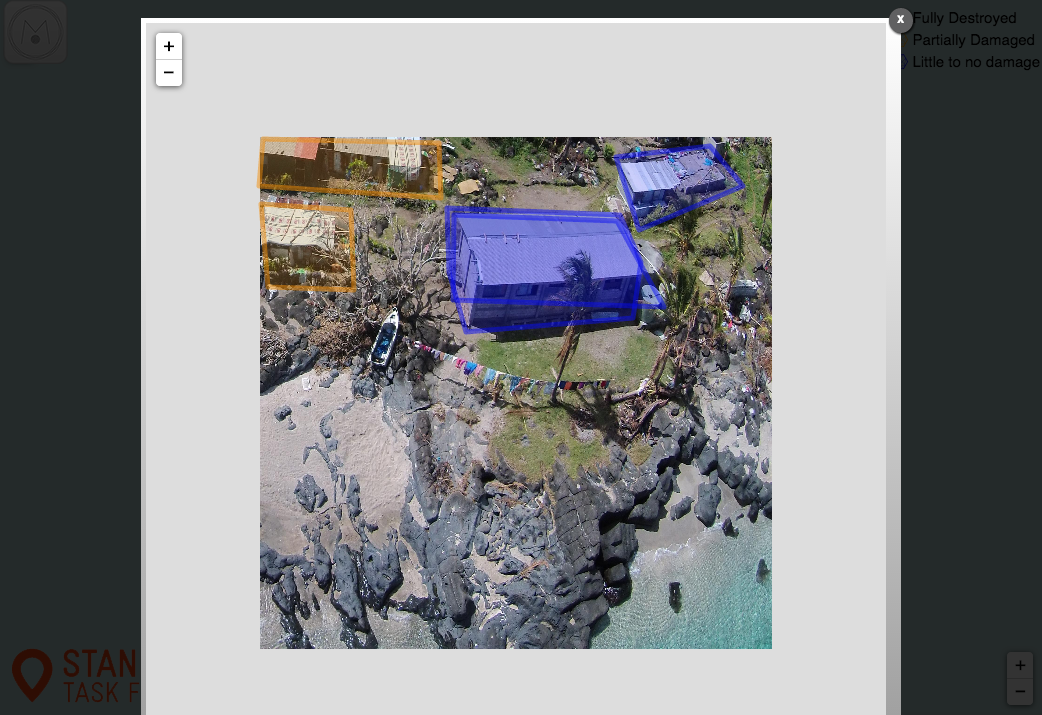
The team also flew over an area that was directly “affected by the expansion of large scale open mining for bauxite.” The water from the river became unsafe to drink; fishing grounds vanished; the nearby lake dried up. Local communities repeatedly protested the irreversible destruction of their ecosystem but this hasn’t stopped mining companies from expanding their activities. Irendra and team were able to take aerial photographs of the affected areas. One of the “high-quality and precise maps” that they were able to generate with these photos has since “been used as an evidence to disclose illegal mining company exploiting bauxites operating outside of their concession area.” These aerial counter-maps are thus “being used to provide evidence against the mining company,” and they also support local community’s efforts to protect their existing lands and forest.”

Irendra and his colleagues took a direct, community-driven approach to these counter-mapping projects: “Community members are involved in establishing the community drone and in deciding who will be responsible to perform drone mapping activities. […] Village meetings also discussed the plans and strategies to perform mapping activities at various different villages with different challenges and contexts. One part of village meetings was training on mapping and drones where participants were informed about participatory counter-mapping techniques as well as the use and the operation of drones to support rapid participatory counter-mapping for high-quality spatial data. A meeting in Subah village agreed to fund the mapping themselves by a monthly contribution of [50 USD] from each [sub-village].”
In sum, co-authors Irendra and Oliver write that UAVs are “very empowering.” “The sense of power and achievement when community members themselves fly the drone is substantial. The empowerment impact that comes with the knowledge that these images are of greater quality than the concession maps and that they have been acknowledged by the Constitutional Court is even greater.”
It is worth noting that the land-use planning maps controlled by the government and companies were made on “the basis of satellite imagery,” which means that “small hamlets [are] not visible. In the process of map-making by the State, the hamlets literally disappeared, losing any rights to their land in the process. With high-resolution drone maps, however, residential areas, farming, fruit tree forests and other long-term uses of the land are rendered visible. Furthermore, local communities require high-quality maps to re-claim those residential areas which now are ‘officially’ part of company’s concessions. These maps are used to support their arguments to halt new concessions for mining and for oil palm.”

Not surprisingly, perhaps, “the counter-mapping process also uncovered simmering territorial conflicts.” In one of these conflicts, “it emerged that the unsettled village border is one the problems.” Irendra and fellow co-author Oliver write that “One of the aims of community drones is to map the area of several villages […] and to confirm village borders.”
The team’s use of UAVs for counter-mapping resulted in a number of political victories that went beyond the local level. In one case, for example, a counter-map was “used as legal evidence at the Constitutional Court trial on the 1st September 2014, providing the chance for drone counter maps to be recognized by the Indonesian legal system in the future.” In another case, counter maps were combined with other evidence to “challenge the provincial government to accept what the civil society organizations demand. Some of their demands were achieved and accepted, including: (1) Recognition of community-managed lands, (2) Recognition of customary community rights, and (3) active community engagement in the spatial planning process. These demands had not been addressed before.” In yet a third case, “Maps made by drones were used to support […] arguments that often mining activities are causing detrimental social and ecological effects. The Constitutional Court ruled against the mining corporations [as a result], upholding the obligation of mining companies to install smelters and to process raw minerals and coal before exporting them.”
These projects have generated a growing interest in UAVs, which is why the local Swandiri Institute recently established a “drones school” where “civil society organizations and community activists who are interested in learning and using drones for mapping and for advocacy work could join and participate.” A second drones school was also launched by other partners to “focus on using drones at village levels to map village areas and to confirm village borders.”
The authors conclude that “the appropriation of drone technology by community activists has the potential to improve the situation with regard to inclusion, transparency, and empowerment. […] Nowadays, younger members of local communities are computer literate. After a mapping flight, images and videos can be directly downloaded on to a laptop, giving instant transparency to village meetings during the mapping project. The resolution is so high that individual houses, trees, etc. can be clearly identified, also increasing transparency and the potential to include just about everybody in territorial discussions.”
But of course, to state the obvious: UAVs are not a silver bullet or “magic wand that can conjure away hierarchies and power structures at the local level or in wider society.” Irendra and team were “unable to use drones in those areas where local elites were in cahoots with plantation and mining companies and controlled traditional institutions such as customary councils and where opposition was marginalized.” In other areas, “hierarchical gender relations […], power dynamics, and territorial disputes between different villages were replicated in the mapping process.” At the same time, the UAV revolution does have “the potential—together with campaigning and political pressure—to force through the recognition of community counter-maps in the spatial planning process […].” To this end, “if embedded within political action, drone technology can revolutionize counter-mapping and become an effective weapon in the struggle against land grabs.” And in this context, “community drones for counter-mapping could well become a technology of the masses, by the masses, and for the masses.”